给我买咖啡
*备忘录:
- 我的帖子解释了randomrotation()。
- 我的帖子解释了randomaffine()。
- 我的帖子解释了牛津iiitpet()。
>
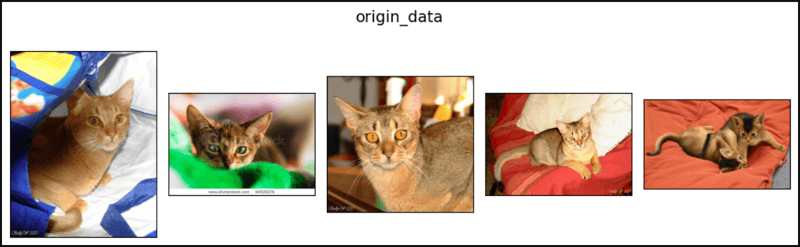
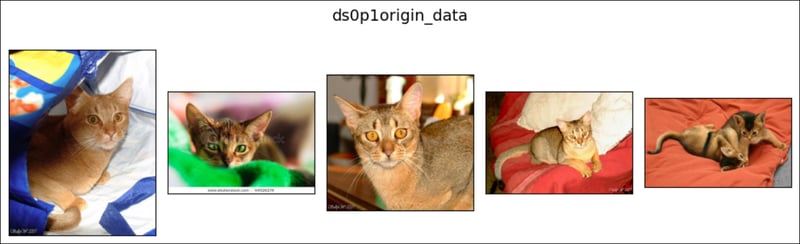
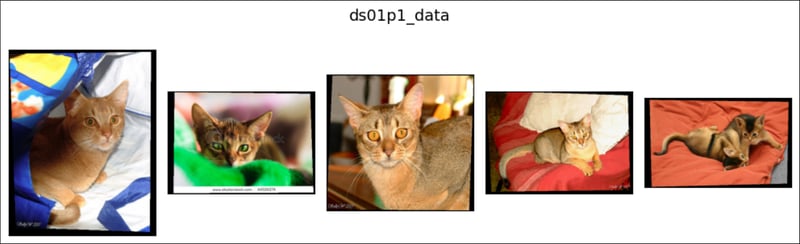
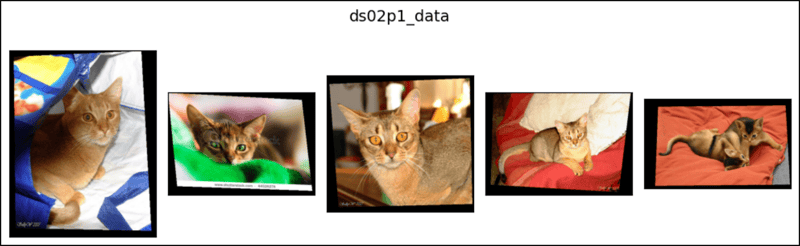
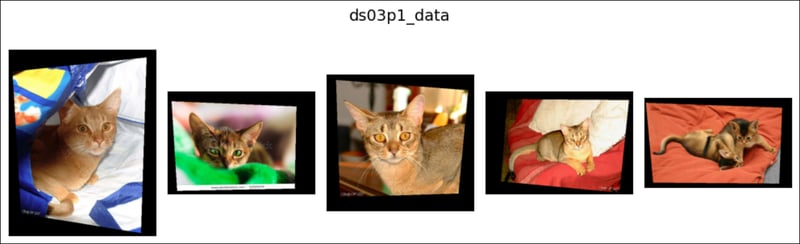
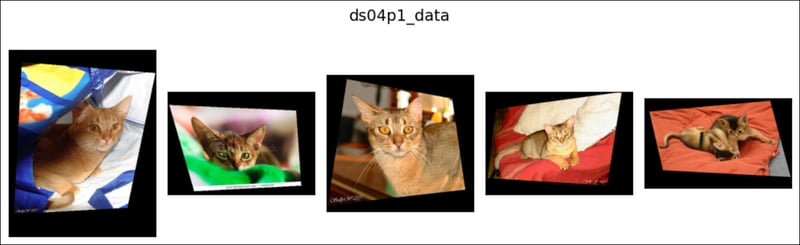
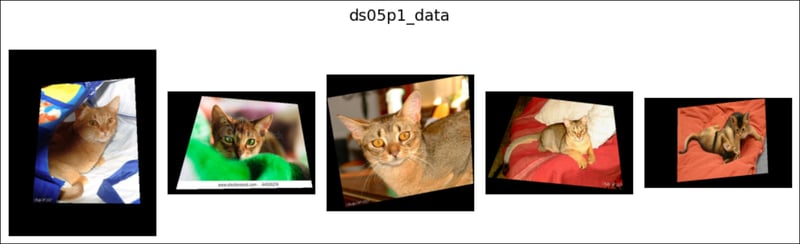
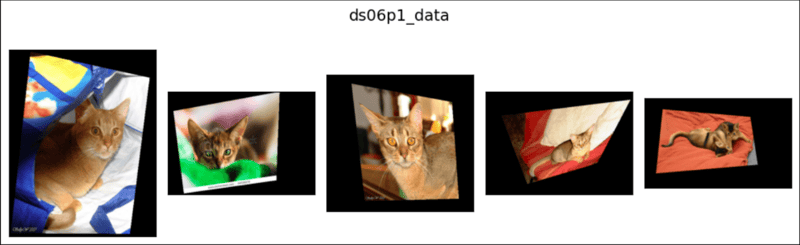
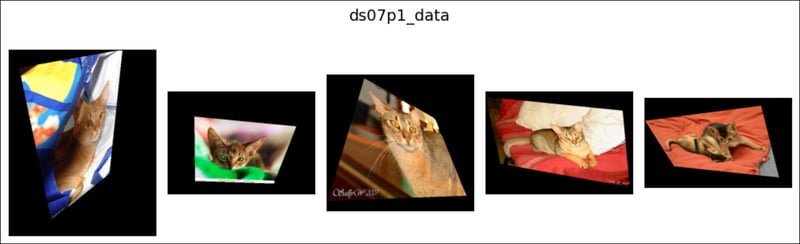
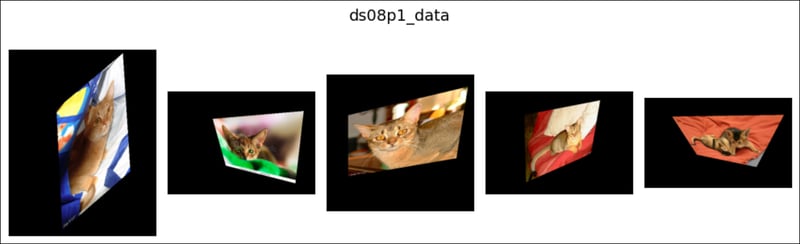
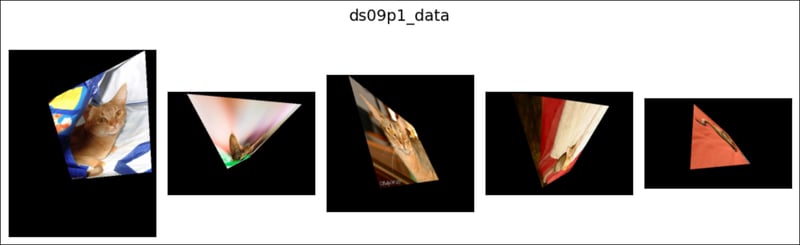
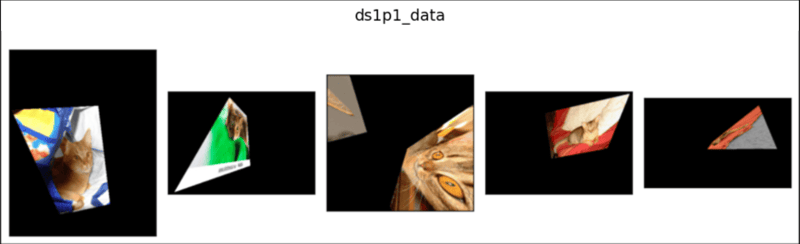
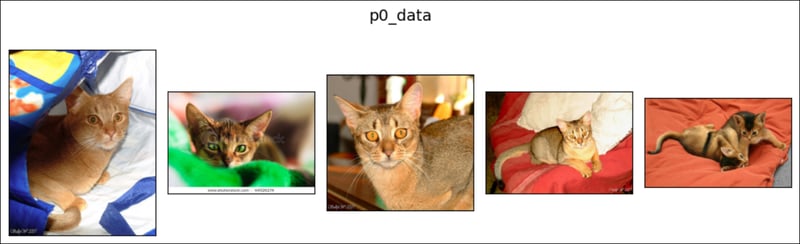
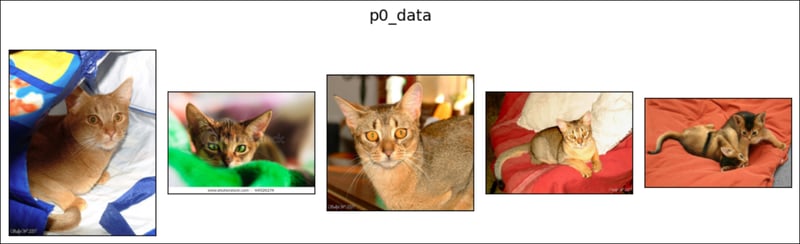
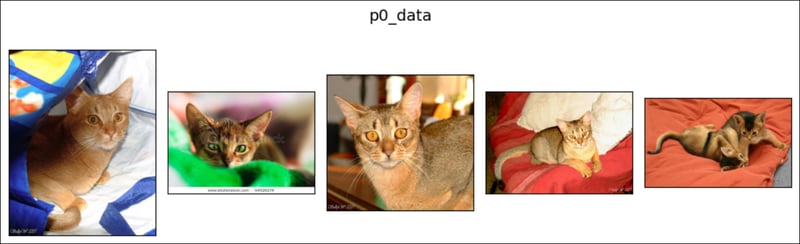
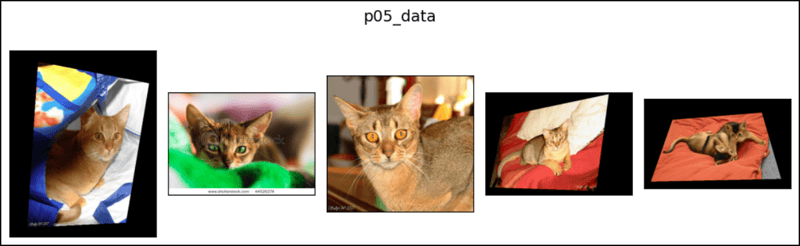
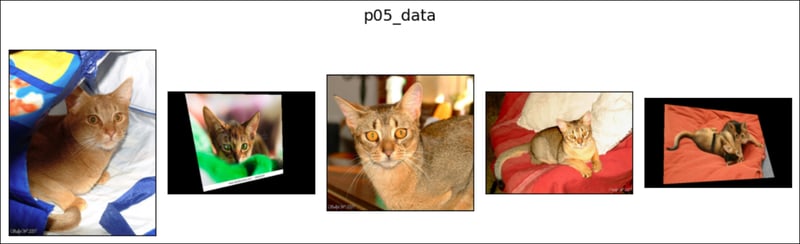
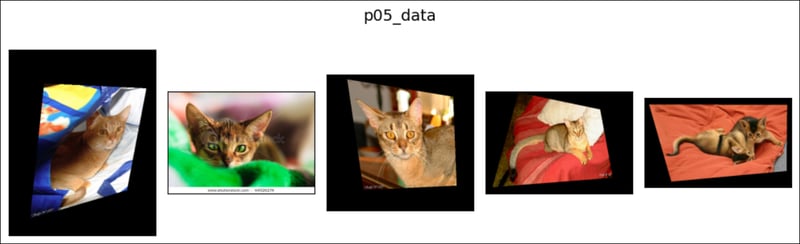
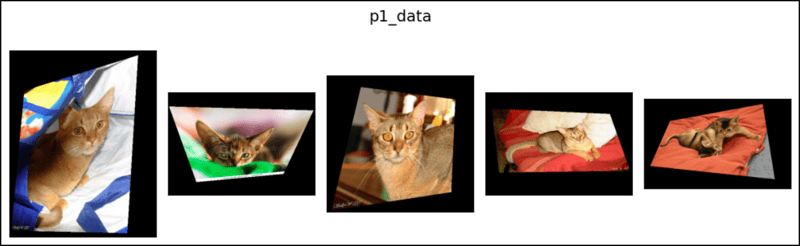
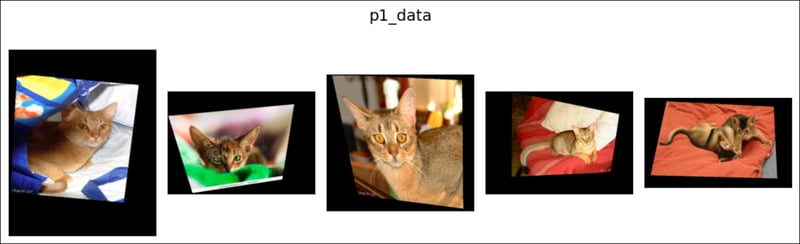
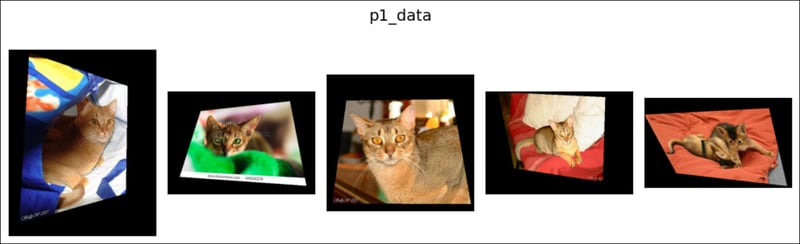
> randomperspective()可以对图像进行随机的透视转换,如下所示:
*备忘录:
- 初始化的第一个参数是distortion_scale(可选默认:0.5型:int或float): *备忘录:
- 它可以进行透视转换。
- 必须为0
>
-
- >是图像是否通过透视转换完成的概率。
- 必须为0
初始化的第三个参数是插值(可选默认:interpolationmode.binear-type:interpolationmode)。
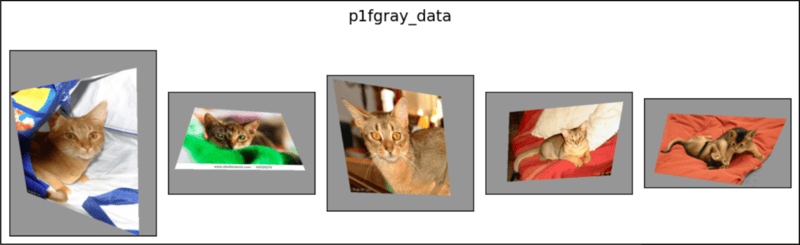
初始化的第四个参数是填充(可选默认:0型:int,float或tuple/tuple/list(int或float)): *备忘录:
- >它可以更改图像的背景。 *在为图像进行透视转换时,可以看到背景。
- 元组/列表必须是具有1或3个元素的1d。
第一个参数是img(必需类型:pil图像或张量(int)): *备忘录:
张量必须为2d或3d。
不使用img =。
-
- 建议根据v1或v2使用v2?我应该使用哪一个?
-
from torchvision.datasets import OxfordIIITPet from torchvision.transforms.v2 import RandomPerspective from torchvision.transforms.functional import InterpolationMode randompers = RandomPerspective() randompers = RandomPerspective(distortion_scale=0.5, p=0.5, interpolation=InterpolationMode.BILINEAR, fill=0) randompers # RandomPerspective(p=0.5, # distortion_scale=0.5, # interpolation=InterpolationMode.BILINEAR, # fill=0) randompers.distortion_scale # 0.5 randompers.p # 0.5 randompers.interpolation # <InterpolationMode.BILINEAR: 'bilinear'> randompers.fill # 0 origin_data = OxfordIIITPet( root="data", transform=None ) ds0p1origin_data = OxfordIIITPet( # `ds` is distortion_scale. root="data", transform=RandomPerspective(distortion_scale=0, p=1) ) ds01p1_data = OxfordIIITPet( root="data", transform=RandomPerspective(distortion_scale=0.1, p=1) ) ds02p1_data = OxfordIIITPet( root="data", transform=RandomPerspective(distortion_scale=0.2, p=1) ) ds03p1_data = OxfordIIITPet( root="data", transform=RandomPerspective(distortion_scale=0.3, p=1) ) ds04p1_data = OxfordIIITPet( root="data", transform=RandomPerspective(distortion_scale=0.4, p=1) ) ds05p1_data = OxfordIIITPet( root="data", transform=RandomPerspective(distortion_scale=0.5, p=1) ) ds06p1_data = OxfordIIITPet( root="data", transform=RandomPerspective(distortion_scale=0.6, p=1) ) ds07p1_data = OxfordIIITPet( root="data", transform=RandomPerspective(distortion_scale=0.7, p=1) ) ds08p1_data = OxfordIIITPet( root="data", transform=RandomPerspective(distortion_scale=0.8, p=1) ) ds09p1_data = OxfordIIITPet( root="data", transform=RandomPerspective(distortion_scale=0.9, p=1) ) ds1p1_data = OxfordIIITPet( root="data", transform=RandomPerspective(distortion_scale=1, p=1) ) p0_data = OxfordIIITPet( root="data", transform=RandomPerspective(p=0) ) p05_data = OxfordIIITPet( root="data", transform=RandomPerspective(p=0.5) ) p1_data = OxfordIIITPet( root="data", transform=RandomPerspective(p=1) ) p1fgray_data = OxfordIIITPet( # `f` is fill. root="data", transform=RandomPerspective(p=1, fill=150) ) p1fpurple_data = OxfordIIITPet( root="data", transform=RandomPerspective(p=1, fill=[160, 32, 240]) ) import matplotlib.pyplot as plt def show_images1(data, main_title=None): plt.figure(figsize=[10, 5]) plt.suptitle(t=main_title, y=0.8, fontsize=14) for i, (im, _) in zip(range(1, 6), data): plt.subplot(1, 5, i) plt.imshow(X=im) plt.xticks(ticks=[]) plt.yticks(ticks=[]) plt.tight_layout() plt.show() show_images1(data=origin_data, main_title="origin_data") print() show_images1(data=ds0p1origin_data, main_title="ds0p1origin_data") show_images1(data=ds01p1_data, main_title="ds01p1_data") show_images1(data=ds02p1_data, main_title="ds02p1_data") show_images1(data=ds03p1_data, main_title="ds03p1_data") show_images1(data=ds04p1_data, main_title="ds04p1_data") show_images1(data=ds05p1_data, main_title="ds05p1_data") show_images1(data=ds06p1_data, main_title="ds06p1_data") show_images1(data=ds07p1_data, main_title="ds07p1_data") show_images1(data=ds08p1_data, main_title="ds08p1_data") show_images1(data=ds09p1_data, main_title="ds09p1_data") show_images1(data=ds1p1_data, main_title="ds1p1_data") print() show_images1(data=p0_data, main_title="p0_data") show_images1(data=p0_data, main_title="p0_data") show_images1(data=p0_data, main_title="p0_data") print() show_images1(data=p05_data, main_title="p05_data") show_images1(data=p05_data, main_title="p05_data") show_images1(data=p05_data, main_title="p05_data") print() show_images1(data=p1_data, main_title="p1_data") show_images1(data=p1_data, main_title="p1_data") show_images1(data=p1_data, main_title="p1_data") print() show_images1(data=p1fgray_data, main_title="p1fgray_data") show_images1(data=p1fpurple_data, main_title="p1fpurple_data") # ↓ ↓ ↓ ↓ ↓ ↓ The code below is identical to the code above. ↓ ↓ ↓ ↓ ↓ ↓ def show_images2(data, main_title=None, ds=0.5, prob=0.5, ip=InterpolationMode.BILINEAR, f=0): plt.figure(figsize=[10, 5]) plt.suptitle(t=main_title, y=0.8, fontsize=14) for i, (im, _) in zip(range(1, 6), data): plt.subplot(1, 5, i) rp = RandomPerspective(distortion_scale=ds, p=prob, # Here interpolation=ip, fill=f) plt.imshow(X=rp(im)) # Here plt.xticks(ticks=[]) plt.yticks(ticks=[]) plt.tight_layout() plt.show() show_images2(data=origin_data, main_title="origin_data", ds=0) print() show_images2(data=origin_data, main_title="ds0p1origin_data", ds=0, prob=1) show_images2(data=origin_data, main_title="ds01p1_data", ds=0.1, prob=1) show_images2(data=origin_data, main_title="ds02p1_data", ds=0.2, prob=1) show_images2(data=origin_data, main_title="ds03p1_data", ds=0.3, prob=1) show_images2(data=origin_data, main_title="ds04p1_data", ds=0.4, prob=1) show_images2(data=origin_data, main_title="ds05p1_data", ds=0.5, prob=1) show_images2(data=origin_data, main_title="ds06p1_data", ds=0.6, prob=1) show_images2(data=origin_data, main_title="ds07p1_data", ds=0.7, prob=1) show_images2(data=origin_data, main_title="ds08p1_data", ds=0.8, prob=1) show_images2(data=origin_data, main_title="ds09p1_data", ds=0.9, prob=1) show_images2(data=origin_data, main_title="ds1p1_data", ds=1, prob=1) print() show_images2(data=origin_data, main_title="p0_data", prob=0) show_images2(data=origin_data, main_title="p0_data", prob=0) show_images2(data=origin_data, main_title="p0_data", prob=0) print() show_images2(data=origin_data, main_title="p05_data", prob=0.5) show_images2(data=origin_data, main_title="p05_data", prob=0.5) show_images2(data=origin_data, main_title="p05_data", prob=0.5) print() show_images2(data=origin_data, main_title="p1_data", prob=1) show_images2(data=origin_data, main_title="p1_data", prob=1) show_images2(data=origin_data, main_title="p1_data", prob=1) print() show_images2(data=origin_data, main_title="p1fgray_data", prob=1, f=150) show_images2(data=origin_data, main_title="p1fpurple_data", prob=1, f=[160, 32, 240])
登录后复制
>初始化的第二个参数为p(可选默认:0.5-type:int或float): *备忘录:
>
以上就是pytorch的兰德姆布森的详细内容,更多请关注php中文网其它相关文章!
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

